Simscape Multibody —— Revolute Joint的使用
本文共 846 字,大约阅读时间需要 2 分钟。
文章目录
驱动设置
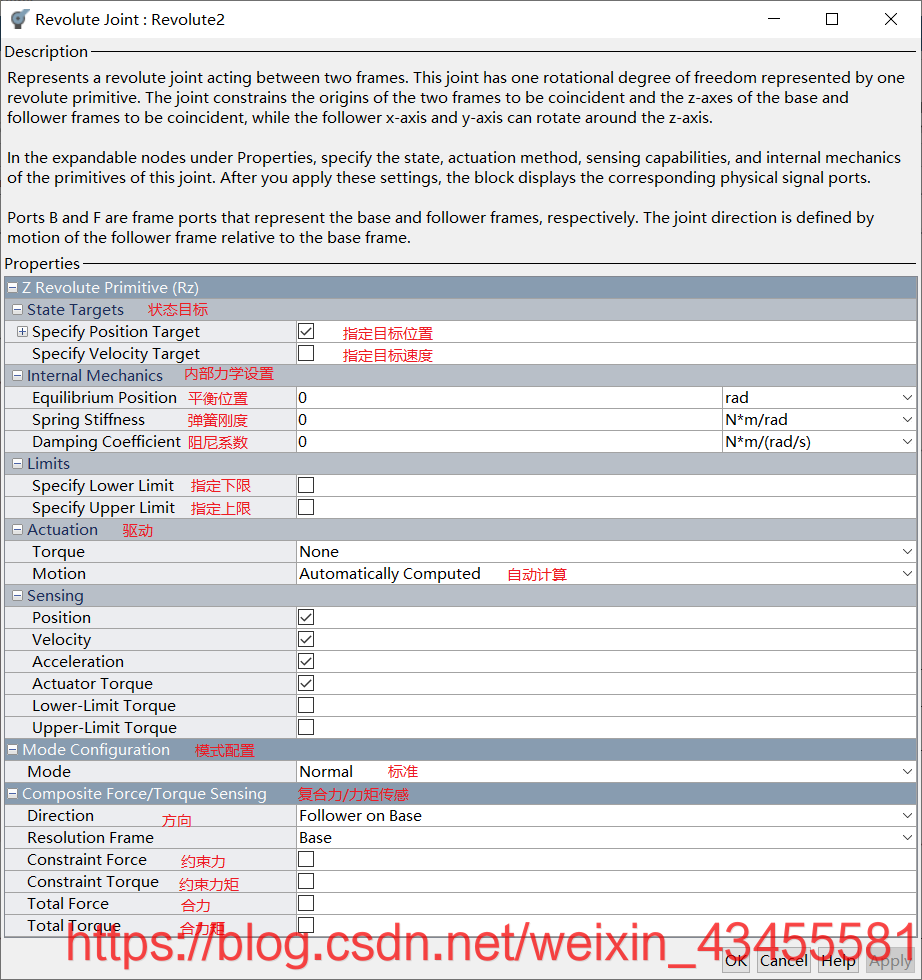
- 扭矩
- None:无执行扭矩
- Provided by Input:来自物理信号输入的致动扭矩。该信号提供了围绕关节原始轴相对于基础框架作用在从动框架上的扭矩。相等且相反的扭矩作用在底架上
- Automatically computed:自动计算的驱动扭矩。Simscape Multibody根据模型动力学计算并施加致动扭矩
- 运动
- Provided by Input:来自物理信号输入的联合原始运动。该信号提供了跟随关节框架相对于基本框架沿关节基本轴的期望轨迹
- Automatically computed:来自自动计算的联合原始运动。Simscape Multibody基于模型动力学计算并应用关节原始运动
模式配置
指定关节的模式。关节可以正常运行,也可以从仿真开始时脱离,或者您可以提供输入信号以在仿真期间更改其模式。
如果将Mode参数设置为Provided by Input,则将看到新的端口模式。
- Normal:关节行为正常
- Disengaged:从仿真开始就将关节分离
- Provided by Input:提供一个输入信号,可以分别是0或-1保持关节处于正常状态或处于脱离状态
接口
框架端口
- B —基础框架
- F —从动框架
操纵口
- 旋转关节提供以下驱动端口: t —作用在Z旋转关节图元上的致动扭矩 q — Z旋转关节图元的所需旋转
传感端口
-
旋转关节传感端口:
q — Z旋转关节图元的角位置 w — Z旋转关节图元的角速度 b — Z旋转关节图元的角加速度 t —作用在Z旋转关节图元上的致动扭矩 tll —由于与Z旋转关节图元的下限接触而产生的扭矩 tul —由于与Z旋转关节图元的上限接触而产生的扭矩 -
以下传感端口提供了作用在关节上的合成力和扭矩:
fc —约束力 tc —约束扭矩 ft —合力 tt —合扭矩
参考文献:
https://ww2.mathworks.cn/help/physmod/sm/ref/revolutejoint.html转载地址:http://rawxf.baihongyu.com/
你可能感兴趣的文章
老板要我开发一个简单的工作流引擎 !
查看>>
MySQL学习笔记——慢查询
查看>>
PL/SQL学习笔记之触发器
查看>>
Python字符编码和转码
查看>>
commons-dbutils【不推荐】
查看>>
SOCAT端口转发
查看>>
docker快速搭建HTTP代理
查看>>
ActiveReports 报表应用教程 (14)---数据可视化
查看>>
Spring Cloud构建微服务架构:分布式服务跟踪(入门)【Dalston版】
查看>>
TestNG 学习总结 - 忽略测试(八)
查看>>
TestNG 学习总结 - 测试结果报告(十四)
查看>>
Java对象深复制、浅复制
查看>>
细分自动化测试
查看>>
使用WebDriver完成web页面切换操作(附源码)
查看>>
从prototype beandefinition 谈 spring 的关闭流程和 prototype 的特性
查看>>
山东科技大学2015-2016学年第一学期程序设计基础期末考试第一场 题解
查看>>
蓝桥杯题解(三)
查看>>
Scala学习第十二天 Scala中的继承:超类的构造、重写字段、重写方法代码实战
查看>>
剑指offer:字符串的组合(java)
查看>>
实时开发框架Meteor API解读系列<二>Core
查看>>